| 專利名稱 |
壓電微動平臺基于Hopfield神經(jīng)網(wǎng)絡(luò)估計器的自適應(yīng)控制方法 |
| 申請?zhí)?專利號 |
CN202210045711.5 |
專利權(quán)人(第一權(quán)利人) |
吉林大學(xué) |
| 申請日 |
2022-01-16 |
授權(quán)日 |
2023-09-19 |
| 專利類別 |
授權(quán)發(fā)明 |
戰(zhàn)略新興產(chǎn)業(yè)分類 |
雙五星 |
| 技術(shù)主題 |
機器學(xué)習(xí)|人工智能|線性化|控制理論|神經(jīng)網(wǎng)絡(luò)|非線性|非線性函數(shù)|算法設(shè)計|自適應(yīng)控制 |
| 應(yīng)用領(lǐng)域 |
自適應(yīng)控制 |
| 意向價格 |
具體面議 |
| 專利概述 |
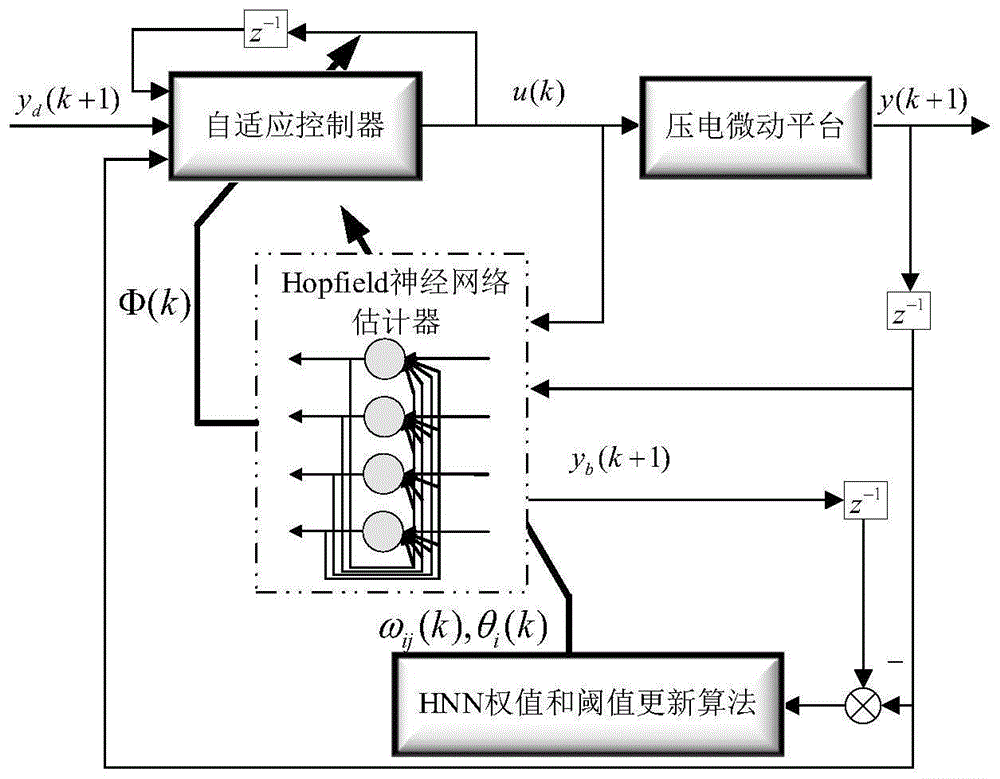
本發(fā)明涉及一種壓電微動平臺基于Hopfield神經(jīng)網(wǎng)絡(luò)估計器的自適應(yīng)控制方法,屬于微納控制技術(shù)領(lǐng)域。將壓電微動平臺表征為帶有遲滯輸入的離散非仿射非線性函數(shù)的形式,在廣義Lipschitz條件下,采用動態(tài)線性化方法和最優(yōu)算法設(shè)計自適應(yīng)控制器,然后設(shè)計Hopfield神經(jīng)網(wǎng)絡(luò)估計器對控制器未知參數(shù)進行在線調(diào)整,該方法利用系統(tǒng)已知的先驗知識將系統(tǒng)遲滯非線性描述為可公式化的Bouc?Wen模型,避免對影響系統(tǒng)性能敏感因素考慮不全而導(dǎo)致閉環(huán)系統(tǒng)精度不高甚至失穩(wěn)的問題。Hopfield神經(jīng)網(wǎng)絡(luò)估計器對系統(tǒng)輸出值進行估計,直觀地反應(yīng)估計器性能,所設(shè)計控制器無需離線建模就能實現(xiàn)壓電微動平臺的高精度跟蹤控制。 |
| 圖片資料 |
|
| 合作方式 |
擬許可 |
| 聯(lián)系人 |
戚梅宇 |
聯(lián)系電話 |
13074363281 |